Web Developement
Artificial Intelligence
System Design
Problem Solving
About Me
AI Full-Stack Engineer with 3+ years of experience in web development and AI. Proficient in React.js/Next.js, Golang, and Python, skilled in machine learning, and experienced in building scalable, efficient, and user-friendly applications.
Experience
Harman
Full Stack AI Engineer
- Collaborated on R&D initiatives investigating Gen AI integration for translation services, prototyping LLM-driven solutions to automate context-aware content adaptation and reduce turnaround time for global market releases.
- Enhanced and maintained internal CLI toolchains built in Golang and Python, implementing critical new features to streamline complex internationalization workflows and improve developer efficiency during localization update cycles.
- Contributed to shared backend libraries and proprietary React UI frameworks by implementing robust i18n support features, ensuring consistent localization standards and seamless scalability across multiple consumer-facing products.
Tata Elxsi
Senior Engineer
- Developed a scalable Next.js/Golang Application to provide a centralized dashboard for monitoring and managing multiple GPU/data resources, offering granular role-based-access controls enhancing security
- Worked collaboratively with the Unity team, ensuring seamless integration of features and tasks, while contributing to the development of Large Language Models (LLMs) to enhance AI capabilities within the project and use-cases.
- Conducted in-depth research on Large Language Model (LLM) architectures. Implemented RAG pipelines to enhance LLM performance and accuracy, Leveraging innovative techniques to achieve more precise and faster responses
Tata Elxsi
Engineer
- Implemented a high-performance gRPC framework to facilitate communication between Unity and a Python back-end, utilizing Jupyter and Docker, enabling the exchange of complex data structures and real-time updates.
- Implemented Behavior Trees Approach to automate the finite machine’s instructive tasks having access to LLMs.
- Integrated ChatGpt with prompt-making React App offering speech recognition and translating from multiple languages, Converting given instruction into robotic actions for planning the execution on real-world robots.
Tata Elxsi
Machine Learning Intern
- Comparative study done on different path Planning Algorithms suitable for Autonomous Vehicle Driving in Indoor and Outdoor Environments, Coded (in C++ and python) and Optimised for same.
- Trained Custom Segmentation model on Recorded Video footage to detect footpaths for Last Mile Delivery Robots.
- Designed end-to-end (Warehouse To Delivery Location) path planning algorithm in C++ to deliver in min time.
- Implemented Multi-Robot Cloud Architecture on Kubernetes to test Cluster network communication for robots.
- Created An OSM Planner which accepts both gui and terminal inputs, generating path over pixelated Open Street Map tiles with calculated approx. distance from Indoor location to Outdoor Goal and Vice-Versa Considering switching between different modes of driving. Task Achieved in C++, using Xml parser lib, Astar algorithm, OSM data, Rviz.
- Recreated 3d World of targeted Area in real world for Autonomous Driving using OSM Model and Blender plugins.
- Implemented Cloud Robotics Architecture on Kubernetes. Successfully tested Cluster network communication through DDS layer of Ros2 Framework. Deployment Achieved in both minikube and microk8s
Rigbetel Labs
Developer Intern
- Worked on Ros based robots local navigation and configuration parameter tuning for custom made robots.
- Robotic 5 Dof Arm Design in Fusion 360 and 3d Printed same for prototype testing with actuators and Moveit Motion planning Framework of ros system.
Vishwakarma Institute Of Technology, Pune
B.Tech
- Explored Research domains under ISRO Lab in Metallurgy and Nano-Technology for advanced materials for aerospace applications.
- Participated in Robotics and AI competitions and hackathons, gaining hands-on experience in automation, machine learning, and collaborative problem-solving.
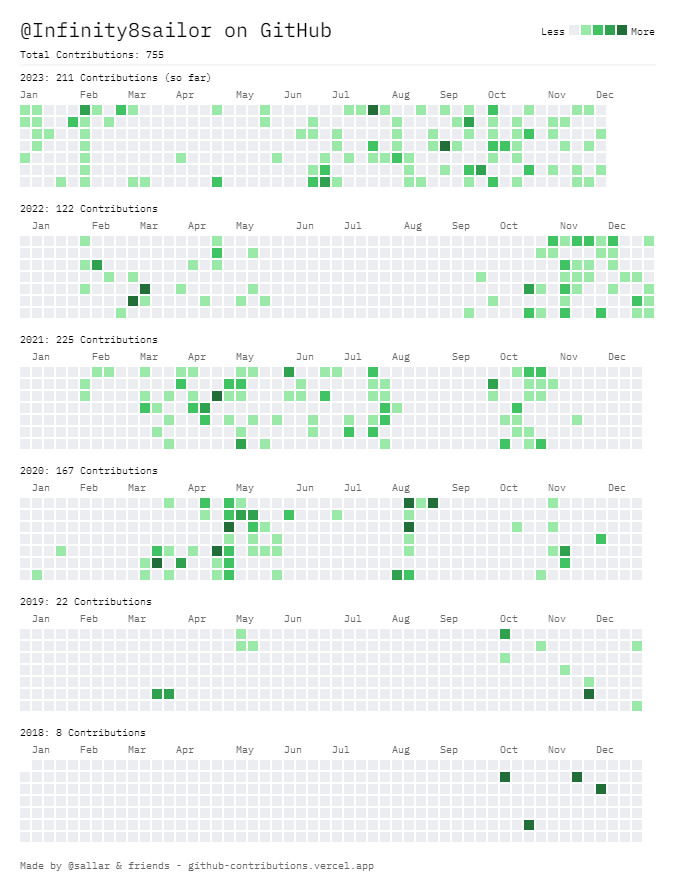
Github
Tech Stack
Languages
Full Stack
Platforms
Elemental
Individual Experimentation and Utility Projects
Music
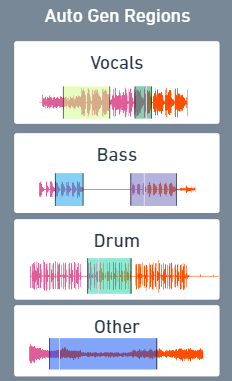
MusicAi
Auto detect Vocals Only Regions
Auto Demix Vocals, Drums, Bass, Others
Personalised Mash-ups
Code
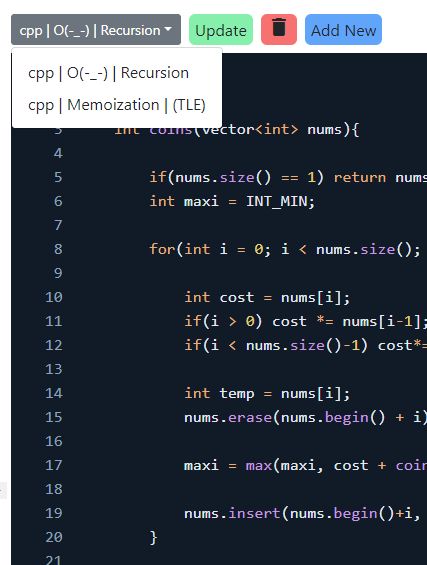
CodeBase
Add Problem details and solution
Multiple solutions can be added
Code syntax highlighting for Different of languages
Search from list of questions available
UI/UX
React Utility Yard
React Component Library
Published on NPM
Uses Tailwind & Material UI Components
One UI, Many Apps
Click me!
Icongirl
Warm Click!
Icon packboy
Editedit
Admin Io
A Personal Side project, Where Random Imaginary Ideas meet Vs-Code
3+
Dev Years
100+
Utilities
Fast
Integration
Source
- Ideas
- Inspiration
- Clone
- Feature
- Random Thought
Major Apps
- Kardz ( Memory )
- Profile-io ( Characters )
- Story ( Writing )
- Ritual ( Automation )
- Links-io (Information )
- Tasks ( Work )
- TimeLine ( Time )
List of Utilities (64)
- Japanese Dictionary
- Character Insights Adder
- Ritual Creator
- Story Writting App
- Mini view for Tasks
- Time-Status based tasks Sorting
- Time on Dashboard
- Speech To Text
- Story Adder
- Sort Fictional-Real Characters
- search links
- Random Wallpaper
- Graphs for daily Activities
- Rein Search Bar
- Ultimate Search
- Quick Sub-Task Adder
- Google Login
- Ritual Agent Editor
- Upload From file or Clipboard
- Text To Speech
- Auto Fetch Raw Info
- Drag and Drop support -Sticky Notes
- Korean Dictionary
- Search characters
- sync local links
- Text To Clipboard
- Ritual Player
- Clipboard to Input Feild
- Duplicate Links checker
- Html Parser
- Links as flash Cards
- Character Gallary
- Dictionary as flash Cards
- Randomize Cards
- Auto IFrame Search and play
- Links Adder
- Random Word Generator For kardz
- English Dictionary
- Profile Creator
- Dictionary Ui similar to google
- links Support for Profiles
- Auto fetch grouped links
- Image Gallary
- Sticky notes Creator
- Words Extractor and Checker
- Story Manager
- Custom Data Creator
- Wallpaper Changer
- Custom Data Formatter and Viewer
- Day logger
- Flash Card App
- week and day viewer
- Sticky Notes Manager
- Lexical Based Story Editor
- Tasks Adder
- data64 PNG to File Converter
- links group support
- Tasks Manager
- Google Cloud Images Store
- image support for links
- Mass Links Creator
- Iframe Manager
- Image name availability Checker
- Ritual State Editor